






高い評価の中国医療用単相バルブ組立機械/PLC 制御/高品質機械/自動供給システム/自動組立ライン

革新性、高品質、信頼性が当社の中核となる価値観です。これらの原則は、今日、これまで以上に高い評価を得ている中国医療用単相バルブ組立機械 / PLC 制御 / 高品質機械 / 自動供給システム / 自動組立ラインの国際的に活動する中規模企業としての当社の成功の基礎を形成しています。私たちは心から歓迎します。海外および国内のビジネスパートナーと同様に、近い将来、お客様と一緒に事業を進めていきたいと考えています。
革新性、高品質、信頼性が当社の中核となる価値観です。これらの原則は、今日、これまで以上に、国際的に活動する中堅企業としての当社の成功の基礎となっています。組立機, 中国自動組立機, 当社では、販売は利益を得ることだけでなく、自社の文化を世界に広めることも重要であると考えています。そのため、私たちは心からのサービスを提供するために一生懸命努力しており、市場で最も競争力のある価格を提示するつもりです。
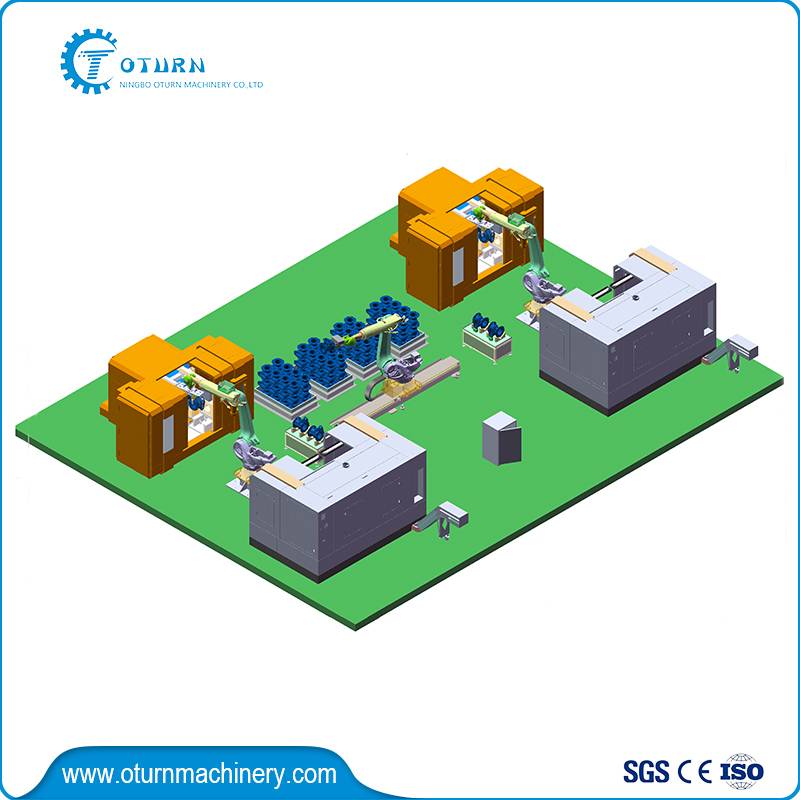
1.オペレータは、弁体ワークを満載したパレットを搬入位置決め溝1と搬入位置決め溝2に位置決めし、空のトレイを搬入位置決め溝1と搬出位置決め溝2に設置して位置決めします。
2.ロボット1のカメラが供給位置決めスロット1内のパレット上のワークをスキャンしてワークを正確に位置決めし、ワーク1をクランプしてバッファテーブル1の位置決め治具に置きます。
同時に、加工済みワーク 3 (ロボット 2 が工作機械 2 からワーク 3 を掴んだところです) を掴み、搬出位置決めスロット 1 に移動し、必要に応じてパレットに整然と配置します。
ロボット 1 のカメラが供給位置決めスロット 2 内のパレット上のワークをスキャンしてワークを正確に位置決めし、ワーク 4 をクランプしてバッファテーブル 2 上の位置決め治具に置きます。
同時に、加工済みワーク 6 (ロボット 3 が工作機械 4 からワーク 6 を掴んだところです) を掴み、搬出位置決めスロット 2 に移動し、必要に応じてパレットに整然と配置します。
3.ロボット2は、バッファテーブル1からワーク1をクランプして工作機械1まで走行し、完成したワーク2を掴んでワーク1をクランプし、工作機械2まで走行し、完成したワーク3を掴んでワーク2をクランプする。 、バッファテーブルまで実行します 1. ワークピースを配置します 3. ロボット 2 がサイクルを完了します。
ロボット3は緩衝テーブル2からワーク4を掴んで工作機械3まで走行し、完成したワーク5を掴んでワーク4をクランプし、工作機械4まで走行して完成したワーク6を掴んでワーク5をクランプする。 、バッファ テーブル 2 まで実行します。 ワークピースを配置します。 6. ロボット 3 がサイクルを完了します。



 革新性、高品質、信頼性が当社の中核となる価値観です。これらの原則は、今日、これまで以上に高い評価を得ている中国医療用単相バルブ組立機械 / PLC 制御 / 高品質機械 / 自動供給システム / 自動組立ラインの国際的に活動する中規模企業としての当社の成功の基礎を形成しています。私たちは心から歓迎します。海外および国内のビジネスパートナーと同様に、近い将来、お客様と一緒に事業を進めていきたいと考えています。
革新性、高品質、信頼性が当社の中核となる価値観です。これらの原則は、今日、これまで以上に高い評価を得ている中国医療用単相バルブ組立機械 / PLC 制御 / 高品質機械 / 自動供給システム / 自動組立ラインの国際的に活動する中規模企業としての当社の成功の基礎を形成しています。私たちは心から歓迎します。海外および国内のビジネスパートナーと同様に、近い将来、お客様と一緒に事業を進めていきたいと考えています。
高い評価を得ている中国自動組立機械、組立機械、当社は、販売は利益を得るだけでなく、当社の文化を世界に広めることであると考えています。そのため、私たちは心からのサービスを提供するために一生懸命努力しており、市場で最も競争力のある価格を提示するつもりです。


![中国のユーザーの評判が良い 4-[4- (ベータ-D-グルコピラノシルオキシ) フェニル]-2-ブタノン ラズベリーグリコシド 99% ラズベリー果実エキス 38963-94-9](https://cdn.globalso.com/oturnmachinery/cacb9f3211-300x300.jpg)