2019 高品質中国 PP シングル女性ユニオンボールバルブ F 灌漑給水用 PP 圧縮継手

現在、当社には、インターネットマーケティング、QC、および2019年の製造方法内のさまざまな厄介なジレンマに対処する優れたスタッフメンバーがたくさんいます。灌漑給水用PP圧縮継手用高品質中国製PPシングルメスユニオンボールバルブF、初期企業、私たちは互いに理解し合っている。さらなる事業、信頼がそこに到達しています。当社は通常、いつでもあなたのサービスに対応します。
現在、当社にはインターネットマーケティング、QC、製造方法におけるさまざまな困難なジレンマに対処する優れたスタッフが多数います。ボールバルブ, 熾烈な世界市場競争に直面する中、当社はブランド構築戦略を立ち上げ、「人間本位の誠実なサービス」の精神を刷新し、世界的な認知度の獲得と持続可能な発展を目指しています。
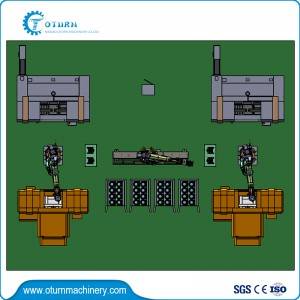
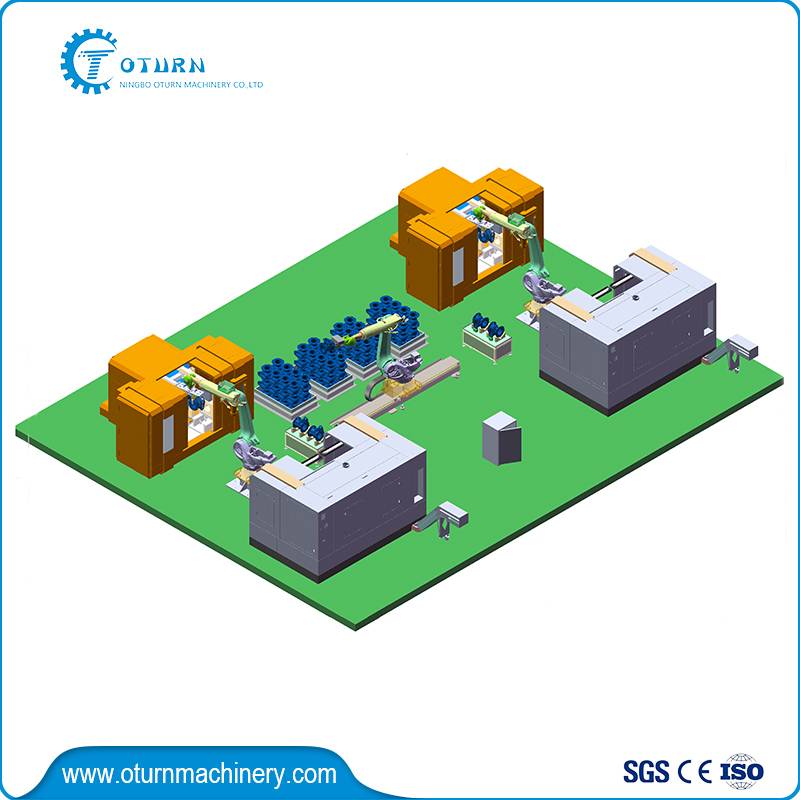
1.オペレータは、弁体ワークを満載したパレットを搬入位置決め溝1と搬入位置決め溝2に位置決めし、空のトレイを搬入位置決め溝1と搬出位置決め溝2に設置して位置決めします。
2.ロボット1のカメラが供給位置決めスロット1内のパレット上のワークをスキャンしてワークを正確に位置決めし、ワーク1をクランプしてバッファテーブル1の位置決め治具に置きます。
同時に、加工済みワーク 3 (ロボット 2 が工作機械 2 からワーク 3 を掴んだところです) を掴み、搬出位置決めスロット 1 に移動し、必要に応じてパレットに整然と配置します。
ロボット 1 のカメラが供給位置決めスロット 2 内のパレット上のワークをスキャンしてワークを正確に位置決めし、ワーク 4 をクランプしてバッファテーブル 2 上の位置決め治具に置きます。
同時に、加工済みワーク 6 (ロボット 3 が工作機械 4 からワーク 6 を掴んだところです) を掴み、搬出位置決めスロット 2 に移動し、必要に応じてパレットに整然と配置します。
3.ロボット2は、バッファテーブル1からワーク1をクランプして工作機械1まで走行し、完成したワーク2を掴んでワーク1をクランプし、工作機械2まで走行し、完成したワーク3を掴んでワーク2をクランプする。 、バッファテーブルまで実行します 1. ワークピースを配置します 3. ロボット 2 がサイクルを完了します。
ロボット3は緩衝テーブル2からワーク4を掴んで工作機械3まで走行し、完成したワーク5を掴んでワーク4をクランプし、工作機械4まで走行して完成したワーク6を掴んでワーク5をクランプする。 、バッファ テーブル 2 まで実行します。 ワークピースを配置します。 6. ロボット 3 がサイクルを完了します。



 現在、当社には、インターネットマーケティング、QC、および2019年の製造方法内のさまざまな厄介なジレンマに対処する優れたスタッフメンバーがたくさんいます。灌漑給水用PP圧縮継手用高品質中国製PPシングルメスユニオンボールバルブF、初期企業、私たちは互いに理解し合っている。さらなる事業、信頼がそこに到達しています。当社は通常、いつでもあなたのサービスに対応します。
現在、当社には、インターネットマーケティング、QC、および2019年の製造方法内のさまざまな厄介なジレンマに対処する優れたスタッフメンバーがたくさんいます。灌漑給水用PP圧縮継手用高品質中国製PPシングルメスユニオンボールバルブF、初期企業、私たちは互いに理解し合っている。さらなる事業、信頼がそこに到達しています。当社は通常、いつでもあなたのサービスに対応します。
2019 高品質中国 HDPE 圧縮継手、PPボールバルブ, 熾烈な世界市場競争に直面する中、当社はブランド構築戦略を立ち上げ、「人間本位の誠実なサービス」の精神を刷新し、世界的な認知度の獲得と持続可能な発展を目指しています。