






OEM/ODMメーカー 中国自動組立ライン / フレキシブルフィーディング / 非標準自動化機械 / 医療用単相バルブ組立ライン / 自動生産ライン

総合的な科学的品質管理プロセス、優れた高品質と優れた信頼を使用して、当社はOEM / ODMメーカーの中国自動組立ライン/フレキシブルフィード/非標準自動機械/医療用単相バルブ組立ラインのこの分野で高い名声を得ています。 /自動生産ライン、私たちは相互利益に基づいて海外の顧客とのさらなる協力を楽しみにしています。詳しくはお気軽にお問い合わせください!
総合的な科学的品質管理プロセス、優れた高品質、優れた信頼を使用して、当社は高い名声を獲得し、この分野での地位を占めています。組立機械, 中国自動組立機、私たちの商品は南米、アフリカ、アジアなどの言葉で非常に人気があります。企業は「一流の製品を作る」ことを目標として、顧客に高品質のソリューションを提供し、高品質のアフターサービスと技術サポートを提供し、顧客の相互利益に努め、より良いキャリアと未来を創造します。
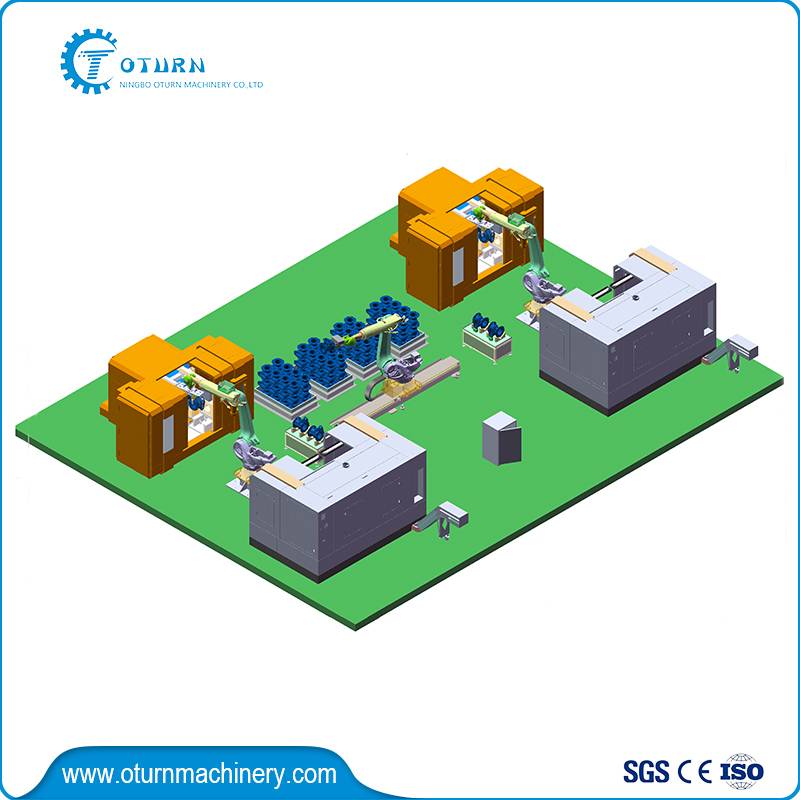
1.オペレータは、弁体ワークを満載したパレットを搬入位置決め溝1と搬入位置決め溝2に位置決めし、空のトレイを搬入位置決め溝1と搬出位置決め溝2に設置して位置決めします。
2.ロボット1のカメラが供給位置決めスロット1内のパレット上のワークをスキャンしてワークを正確に位置決めし、ワーク1をクランプしてバッファテーブル1の位置決め治具に置きます。
同時に、加工済みワーク 3 (ロボット 2 が工作機械 2 からワーク 3 を掴んだところです) を掴み、搬出位置決めスロット 1 に移動し、必要に応じてパレットに整然と配置します。
ロボット 1 のカメラが供給位置決めスロット 2 内のパレット上のワークをスキャンしてワークを正確に位置決めし、ワーク 4 をクランプしてバッファテーブル 2 上の位置決め治具に置きます。
同時に、加工済みワーク 6 (ロボット 3 が工作機械 4 からワーク 6 を掴んだところです) を掴み、搬出位置決めスロット 2 に移動し、必要に応じてパレットに整然と配置します。
3.ロボット2は、バッファテーブル1からワーク1をクランプして工作機械1まで走行し、完成したワーク2を掴んでワーク1をクランプし、工作機械2まで走行し、完成したワーク3を掴んでワーク2をクランプする。 、バッファテーブルまで実行します 1. ワークピースを配置します 3. ロボット 2 がサイクルを完了します。
ロボット3は緩衝テーブル2からワーク4を掴んで工作機械3まで走行し、完成したワーク5を掴んでワーク4をクランプし、工作機械4まで走行して完成したワーク6を掴んでワーク5をクランプする。 、バッファ テーブル 2 まで実行します。 ワークピースを配置します。 6. ロボット 3 がサイクルを完了します。




総合的な科学的品質管理プロセス、優れた高品質と優れた信頼を使用して、当社はOEM / ODMメーカーの中国自動組立ライン/フレキシブルフィード/非標準自動機械/医療用単相バルブ組立ラインのこの分野で高い名声を得ています。 /自動生産ライン、私たちは相互利益に基づいて海外の顧客とのさらなる協力を楽しみにしています。詳しくはお気軽にお問い合わせください!
OEM/ODM メーカー中国自動組立機械、組立機械、当社の商品は南米、アフリカ、アジアなどで非常に人気があります。企業は「一流の製品を作る」ことを目標として、顧客に高品質のソリューションを提供し、高品質のアフターサービスと技術サポートを提供し、顧客の相互利益に努め、より良いキャリアと未来を創造します。


