






中国向けペットボトル用パッケージ飲料水生産ライン一式を新規納入

現在、私たちは高度に開発されたデバイスを持っています。当社の商品は米国、英国などに輸出されており、中国向けペットボトル用完全包装飲料水生産ラインの新規納入のお客様に大変ご好評をいただいております。世界が私たちに呼びかけて、相互利益のための協力を求めてください。
現在、私たちは高度に開発されたデバイスを持っています。当社の商品はアメリカ、イギリスなどに輸出されており、多くのお客様にご好評をいただいております。生産ライン、国内外のお客様のますます高まるご要望にお応えするため、当社は「品質、創造性、効率性、信頼性」の企業精神を継承し、現在のトレンドをトップにし、ファッションをリードするよう努めてまいります。皆様のご訪問、ご協力を心より歓迎いたします。
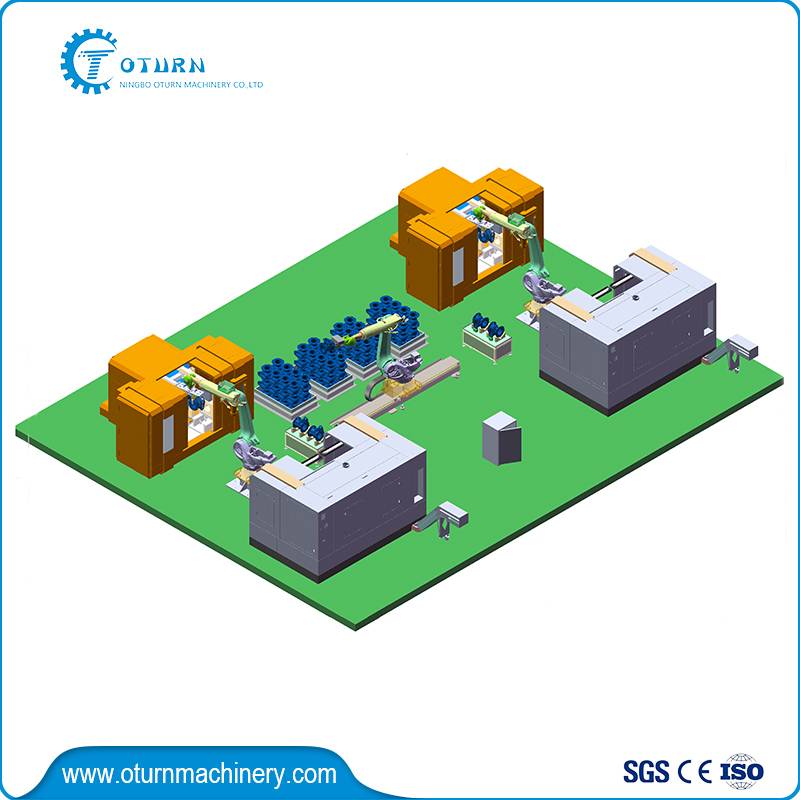
1.オペレータは、弁体ワークを満載したパレットを搬入位置決め溝1と搬入位置決め溝2に位置決めし、空のトレイを搬入位置決め溝1と搬出位置決め溝2に設置して位置決めします。
2.ロボット1のカメラが供給位置決めスロット1内のパレット上のワークをスキャンしてワークを正確に位置決めし、ワーク1をクランプしてバッファテーブル1の位置決め治具に置きます。
同時に、加工済みワーク 3 (ロボット 2 が工作機械 2 からワーク 3 を掴んだところです) を掴み、搬出位置決めスロット 1 に移動し、必要に応じてパレットに整然と配置します。
ロボット 1 のカメラが供給位置決めスロット 2 内のパレット上のワークをスキャンしてワークを正確に位置決めし、ワーク 4 をクランプしてバッファテーブル 2 上の位置決め治具に置きます。
同時に、加工済みワーク 6 (ロボット 3 が工作機械 4 からワーク 6 を掴んだところです) を掴み、搬出位置決めスロット 2 に移動し、必要に応じてパレットに整然と配置します。
3.ロボット2は、バッファテーブル1からワーク1をクランプして工作機械1まで走行し、完成したワーク2を掴んでワーク1をクランプし、工作機械2まで走行し、完成したワーク3を掴んでワーク2をクランプする。 、バッファテーブルまで実行します 1. ワークピースを配置します 3. ロボット 2 がサイクルを完了します。
ロボット3は緩衝テーブル2からワーク4を掴んで工作機械3まで走行し、完成したワーク5を掴んでワーク4をクランプし、工作機械4まで走行して完成したワーク6を掴んでワーク5をクランプする。 、バッファ テーブル 2 まで実行します。 ワークピースを配置します。 6. ロボット 3 がサイクルを完了します。



 現在、私たちは高度に開発されたデバイスを持っています。当社の商品は米国、英国などに輸出されており、中国向けペットボトル用完全包装飲料水生産ラインの新規納入のお客様に大変ご好評をいただいております。世界が私たちに呼びかけて、相互利益のための協力を求めてください。
現在、私たちは高度に開発されたデバイスを持っています。当社の商品は米国、英国などに輸出されており、中国向けペットボトル用完全包装飲料水生産ラインの新規納入のお客様に大変ご好評をいただいております。世界が私たちに呼びかけて、相互利益のための協力を求めてください。
中国向け小規模給水工場への新規納入。国内外のお客様のますます高まるご要望にお応えするため、「品質、創造性、効率性、信頼性」の企業精神を継承し、現状のトップを目指して努力してまいります。トレンドとファッションをリードします。皆様のご訪問、ご協力を心より歓迎いたします。




