






さまざまな用途に使用される中国のバルブ部品のユーザーの評判が良い

当社は、中国のさまざまな用途のバルブ部品のユーザーからの良い評判を得るために、「品質は間違いなくビジネスの命であり、ステータスはビジネスの魂であるかもしれない」という基本原則を堅持しています。ぜひ当社の製造ユニットをチェックしてください。長期的には、国内外の消費者との歓迎的なビジネス関係を構築することを目指してください。
当社は、「品質は間違いなくビジネスの命であり、ステータスはビジネスの魂である」という基本原則を堅持しています。鋳造バルブ本体, 中国バルブ, 現在、私たちはこの業界で8年以上の経験があり、この分野で高い評価を得ています。当社の製品は世界中のお客様から高い評価を得ています。私たちの目標は、お客様が目標を実現できるよう支援することです。私たちはこのWin-Winの状況を達成するために多大な努力を払っており、皆様の参加を心より歓迎いたします。
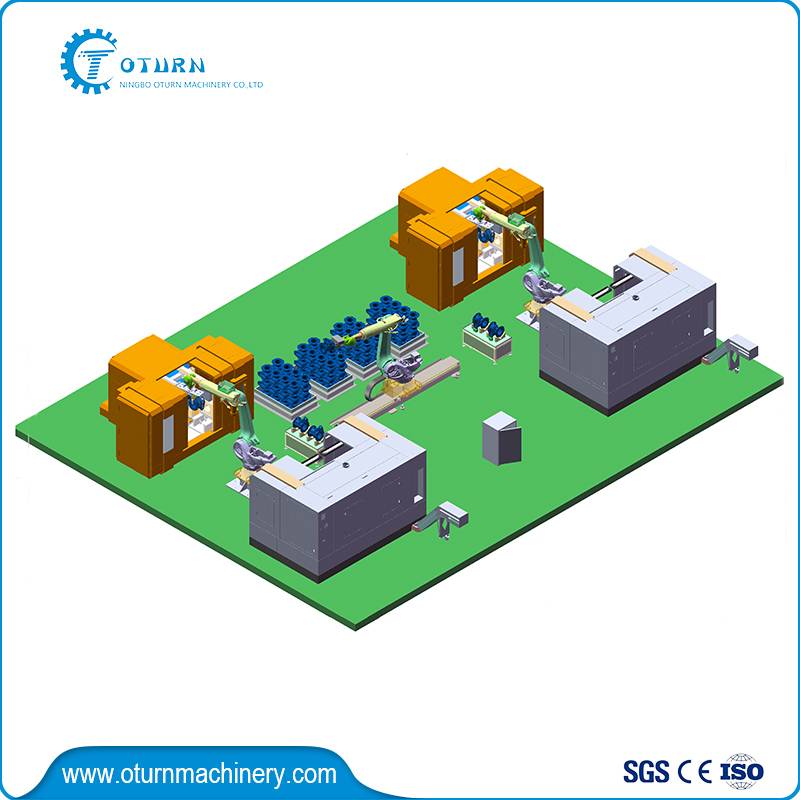
1.オペレータは、弁体ワークを満載したパレットを搬入位置決め溝1と搬入位置決め溝2に位置決めし、空のトレイを搬入位置決め溝1と搬出位置決め溝2に設置して位置決めします。
2.ロボット1のカメラが供給位置決めスロット1内のパレット上のワークをスキャンしてワークを正確に位置決めし、ワーク1をクランプしてバッファテーブル1の位置決め治具に置きます。
同時に、加工済みワーク 3 (ロボット 2 が工作機械 2 からワーク 3 を掴んだところです) を掴み、搬出位置決めスロット 1 に移動し、必要に応じてパレットに整然と配置します。
ロボット 1 のカメラが供給位置決めスロット 2 内のパレット上のワークをスキャンしてワークを正確に位置決めし、ワーク 4 をクランプしてバッファテーブル 2 上の位置決め治具に置きます。
同時に、加工済みワーク 6 (ロボット 3 が工作機械 4 からワーク 6 を掴んだところです) を掴み、搬出位置決めスロット 2 に移動し、必要に応じてパレットに整然と配置します。
3.ロボット2は、バッファテーブル1からワーク1をクランプして工作機械1まで走行し、完成したワーク2を掴んでワーク1をクランプし、工作機械2まで走行し、完成したワーク3を掴んでワーク2をクランプする。 、バッファテーブルまで実行します 1. ワークピースを配置します 3. ロボット 2 がサイクルを完了します。
ロボット3は緩衝テーブル2からワーク4を掴んで工作機械3まで走行し、完成したワーク5を掴んでワーク4をクランプし、工作機械4まで走行して完成したワーク6を掴んでワーク5をクランプする。 、バッファ テーブル 2 まで実行します。 ワークピースを配置します。 6. ロボット 3 がサイクルを完了します。




当社は、中国のさまざまな用途のバルブ部品のユーザーからの良い評判を得るために、「品質は間違いなくビジネスの命であり、ステータスはビジネスの魂であるかもしれない」という基本原則を堅持しています。ぜひ当社の製造ユニットをチェックしてください。長期的には、国内外の消費者との歓迎的なビジネス関係を構築することを目指してください。
中国バルブ、鋳造バルブ本体に対するユーザーの良い評判。現在、私たちはこの業界で8年以上の経験があり、この分野で良い評判を持っています。当社の製品は世界中のお客様から高い評価を得ています。私たちの目標は、お客様が目標を実現できるよう支援することです。私たちはこのWin-Winの状況を達成するために多大な努力を払っており、皆様の参加を心より歓迎いたします。




